




Mirage 4-Aen 3D Scanner ass mat 4 Grupp vun Kamera Lens equipéiert, déi no der Gréisst vum Objet an detailléiert Textur vun der Objet Uewerfläch gewielt a verréckelt ginn. Grouss a kleng präzis Scannen kënne gläichzäiteg duerchgefouert ginn ouni Upassung oder nei Ofgrenzung vun der Kameralens. Mirage 4-Aen Serie enthält wäiss Liicht a blo Liicht 3D Scanner.
Strukturéiert Liichtjoer 3D Scanner-3DSS-MIRG-III

Kuerz Aféierung vun 3D Scanner
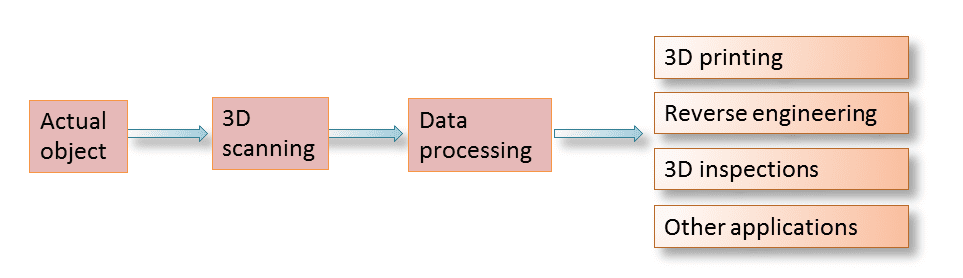
3D Scanner ass e wëssenschaftlecht Instrument dat benotzt gëtt fir d'Form an d'Erscheinungsdaten vun Objeten oder Ëmfeld an der realer Welt z'entdecken an z'analyséieren, dorënner Geometrie, Faarf, Surface Albedo, etc.
Déi gesammelt Donnéeën ginn dacks benotzt fir 3D Rekonstruktiounsberechnungen auszeféieren fir en digitale Modell vum aktuellen Objet an der virtueller Welt ze kreéieren. Dës Modeller ginn an enger breet Palette vun Uwendungen benotzt wéi industriellen Design, Fehlerkennung, Reverse Engineering, Charakter Scannen, Roboterleitung, Geomorphologie, medizinesch Informatioun, biologesch Informatioun, kriminell Identifikatioun, Digital Patrimoine Sammlung, Filmproduktioun a Spillkreatiounsmaterialien.
Prinzip an Charakteristiken vun Net-Kontakt 3D Scanner
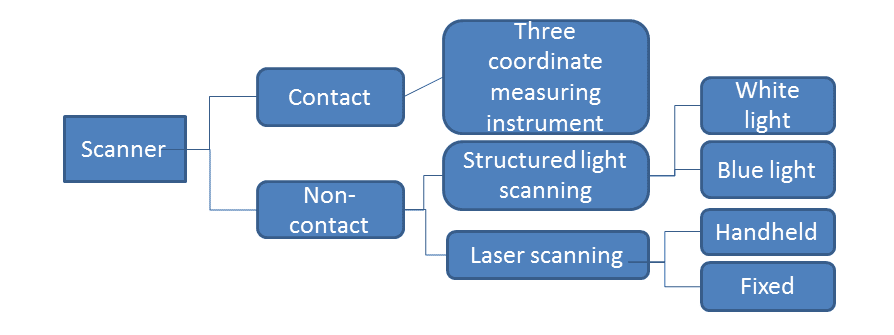
Net-Kontakt 3D Scanner: dorënner eng Uewerfläch strukturéiert Liichtjoer 3D Scanner (och eng Foto oder portable oder Raster 3D Scanner genannt) an engem Laser Scanner.
Den Net-Kontakt Scanner ass populär bei de Leit fir seng einfach Operatioun, praktesch Droen, séier Scannen, flexibel Notzung a kee Schued un Artikelen. Et ass och de Mainstream vun der aktueller technologescher Entwécklung. Wat mir nennen "3D Scanner" bezitt sech op en net-Kontakt Scanner.
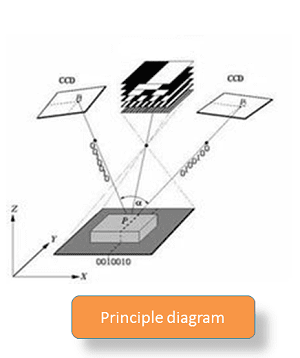
Prinzip vun strukturéiert Liichtjoer 3D Scanner
De Prinzip vun engem strukturéierte Liicht 3D Scanner ass ähnlech wéi de Prozess vun enger Kamera eng Foto. Et ass eng komposit dreidimensional Net-Kontakt Miesstechnologie déi strukturell Liichttechnologie, Phasmiesstechnologie a Computervisiounstechnologie kombinéiert. Wärend der Messung projizéiert de Gitterprojektiounsapparat eng Villfalt vu spezifesche kodéierte strukturéierte Luuchten op den Objet fir ze testen, an déi zwou Kameraen an engem gewësse Wénkel synchron entspriechend Biller kréien, dann decodéieren a Phasen d'Bild, a benotzen passende Techniken an Dräieck. De Miessprinzip gëtt benotzt fir déi dreidimensional Koordinate vun de Pixel an der gemeinsamer Vue vun den zwou Kameraen ze berechnen.
Charakteristike vun 3DSS Scanner
1. Gemeinsam automatesch, ënnerstëtzen déi bescht Donnéeën aus der iwwerlappende Punkt Wollek Donnéeën ze wielen.
2. Héich Scannergeschwindegkeet, eenzeg Scannzäit ass manner wéi 3 Sekonnen.
3. Héich Präzisioun, eenzege Scan kann Punkte vun 1 Millioun sammelen.
4. Scannen Daten ginn automatesch gespäichert, keen Afloss op d'Operatiounszäit.
5. Ausgabdatendateien wéi GPD / STL / ASC / IGS.
6. Adoptioun vun LED kale Liichtquell, kleng Hëtzt, Leeschtung ass stabil.
7. Haaptkierper ass aus Kuelestofffaser gemaach, thermesch Stabilitéit ass méi héich.
8. Patentéiert streamline Ausbléck Design, schéin, liicht an haltbar.
Applikatioun Fäll
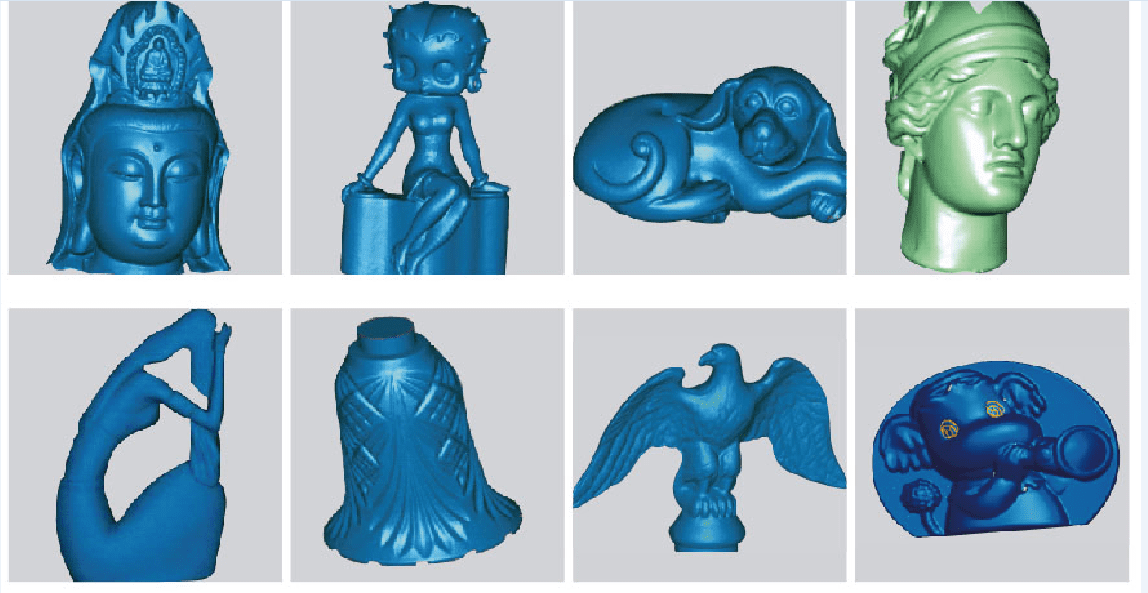
Applikatioun Felder
Single Scan Beräich: 400mm(X) *300mm(Y)
Single Scan Präzisioun: ± 0,02 mm
Single Scan Zäit: <3s
Single Scan Resolutioun: 1.310.000 / 3.000.000 / 5.000.000
Punktwollek Ausgangsformat: GPD/STL/ASC/IGS/WRL
kompatibelmat Standard Reverse Engineering an 3D CAD Software
Schreift Äre Message hei a schéckt en un eis





